ros_gazebo_gym.task_envs.panda.panda_slide
An ROS Panda slide gymnasium environment.
This environment is an extension of the PandaPickAndPlaceEnv task environment,
sharing most features such as observation and action spaces. Notable distinctions are detailed below.
- Goal:
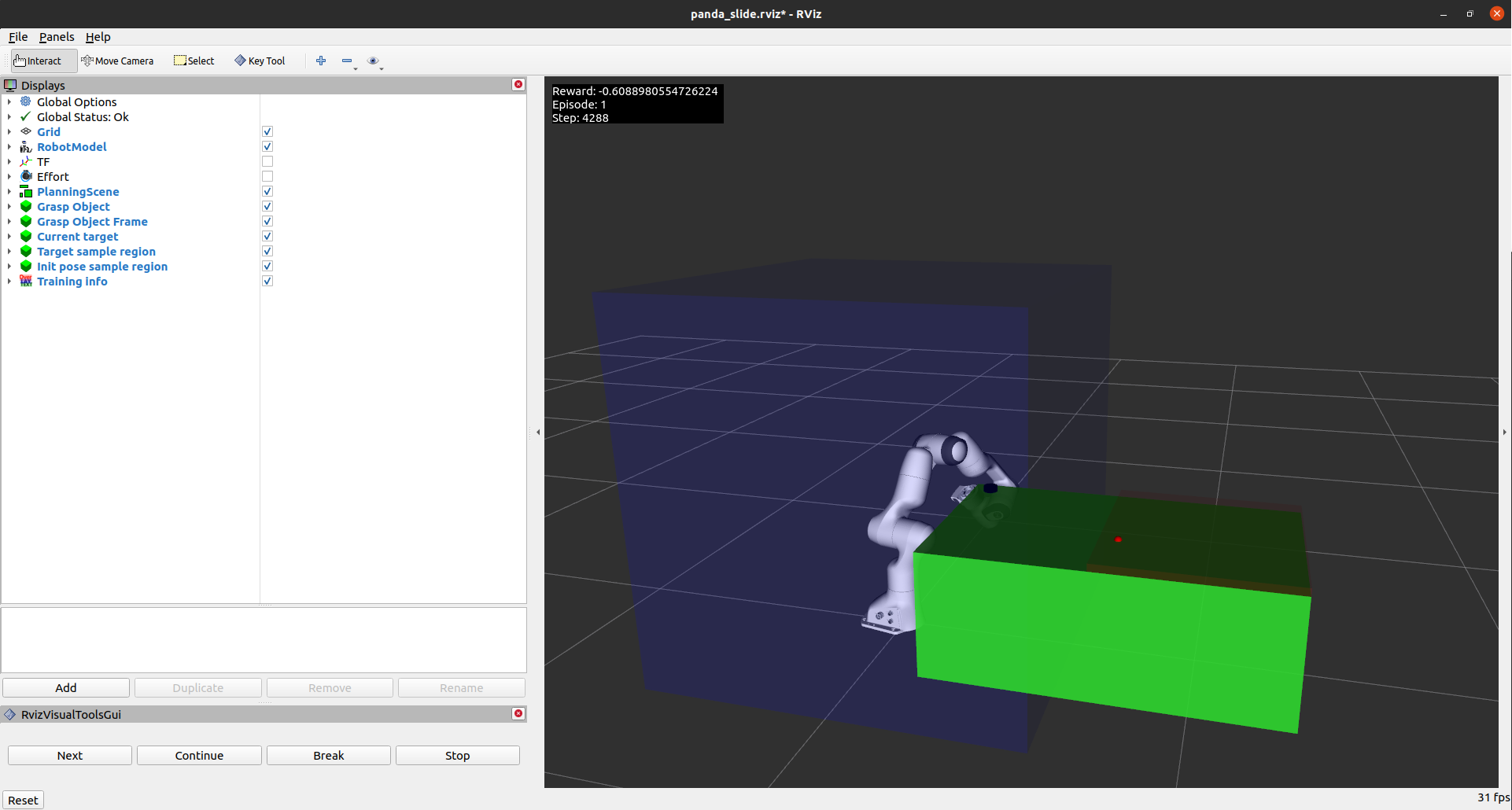
In this environment the agent has to learn to slide a puck to a desired goal position. It was based on the FetchSlide-v2 gymnasium environment.
Configuration
The configuration files for this environment are found in the panda task environment config folder.
Module Contents
Classes
Classed used to create a Panda slide environment. |
Attributes
- class ros_gazebo_gym.task_envs.panda.panda_slide.PandaSlideEnv(*args, **kwargs)[source]
Bases:
ros_gazebo_gym.task_envs.panda.panda_pick_and_place.PandaPickAndPlaceEnv,gymnasium.utils.EzPickleClassed used to create a Panda slide environment.
Initializes a Panda Slide task environment.
- Parameters:
*args – Arguments passed to the
PandaSlideEnvsuper class.**kwargs – Keyword arguments that are passed to the
PandaSlideEnvsuper class.